Khoa Cơ khí – Trường Đại học Kinh tế – Kỹ thuật Công nghiệp đã tổ chức thành công Hội thảo khoa học với chủ đề “Giải pháp sáng tạo: Robocon và Xe tự hành”
Với sự phát triển mạnh mẽ của công nghệ trong thời kỳ công nghiệp 4.0, các hệ thống robot tự hành và các giải pháp điều khiển tự động đang ngày càng đóng vai trò quan trọng trong công nghiệp sản xuất và đời sống. Trong bối cảnh đó, việc nghiên cứu và phát triển các mô hình Robocon, xe tự hành không chỉ là xu hướng tất yếu mà còn là động lực thúc đẩy sáng tạo và ứng dụng công nghệ mới vào thực tiễn.
Nhằm cập nhật kiến thức mới, thúc đẩy hoạt động nghiên cứu khoa học và tạo cơ hội cho sinh viên giao lưu, học hỏi, sáng ngày 23/4/2025, được sự đồng ý của Đảng ủy và Ban Giám hiệu Nhà trường, Khoa Cơ khí – Trường Đại học Kinh tế – Kỹ thuật Công nghiệp đã tổ chức thành công Hội thảo khoa học với chủ đề “Giải pháp sáng tạo: Robocon và Xe tự hành” tại phòng hội thảo cơ sở 454 Minh Khai, quận Hai Bà Trưng, thành phố Hà Nội.
Đến tham dự hội thảo, về phía Nhà trường có sự góp mặt của các thầy cô lãnh đạo Khoa Cơ khí, giảng viên các bộ môn liên quan và đông đảo các em sinh viên yêu thích lĩnh vực robot, cơ điện tử và tự động hóa.
Phát biểu khai mạc hội thảo, TS. Nguyễn Thành Huân – Phó Trưởng khoa Cơ khí đã gửi lời cảm ơn chân thành tới các đại biểu, thầy cô và sinh viên đã tham dự. Trong bài phát biểu, thầy nhấn mạnh tầm quan trọng của việc nắm bắt các xu hướng công nghệ mới, đồng thời mong muốn buổi hội thảo sẽ trở thành cầu nối giúp các bạn sinh viên tiếp cận gần hơn với thực tế nghiên cứu và ứng dụng.

TS. Nguyễn Thành Huân phát biểu khai mạc hội thảo
Tiếp nối phần khai mạc, các đại biểu tham dự đã lần lượt trình bày các báo cáo tham luận. Nội dung các chuyên đề tập trung vào những vấn đề thực tiễn, các xu hướng nghiên cứu và ứng dụng hiện nay trong lĩnh vực Robocon và xe tự hành.
Mở đầu chương trình là Chuyên đề 1 với báo cáo “Giải pháp nhận dạng và bám đối tượng bằng thị giác máy tính ứng dụng trên xe tự hành”. Bài tham luận đã giới thiệu những công nghệ mới trong xử lý ảnh và thị giác máy tính, giúp xe tự hành có khả năng nhận diện và bám theo đối tượng một cách thông minh, an toàn hơn trong quá trình di chuyển.

KS. Đặng Huy Hoàn trình bày chuyên đề 1
Tiếp theo, Chuyên đề 2 trình bày về “Nghiên cứu xây dựng hệ thống quản lý và điều phối xe tự hành trong công nghiệp”. Báo cáo nêu rõ tầm quan trọng của việc tối ưu hóa điều phối các phương tiện tự hành trong nhà máy nhằm tăng hiệu suất vận hành và giảm thiểu chi phí logistics nội bộ.
Sang đến Chuyên đề 3, tham luận với nội dung “Một số giải pháp điều khiển chuyển động bám quỹ đạo cho hệ robot di động” đã đưa ra các phương pháp điều khiển tiên tiến như PID, MPC, đồng thời phân tích ưu nhược điểm và tính ứng dụng trong thực tế sản xuất.
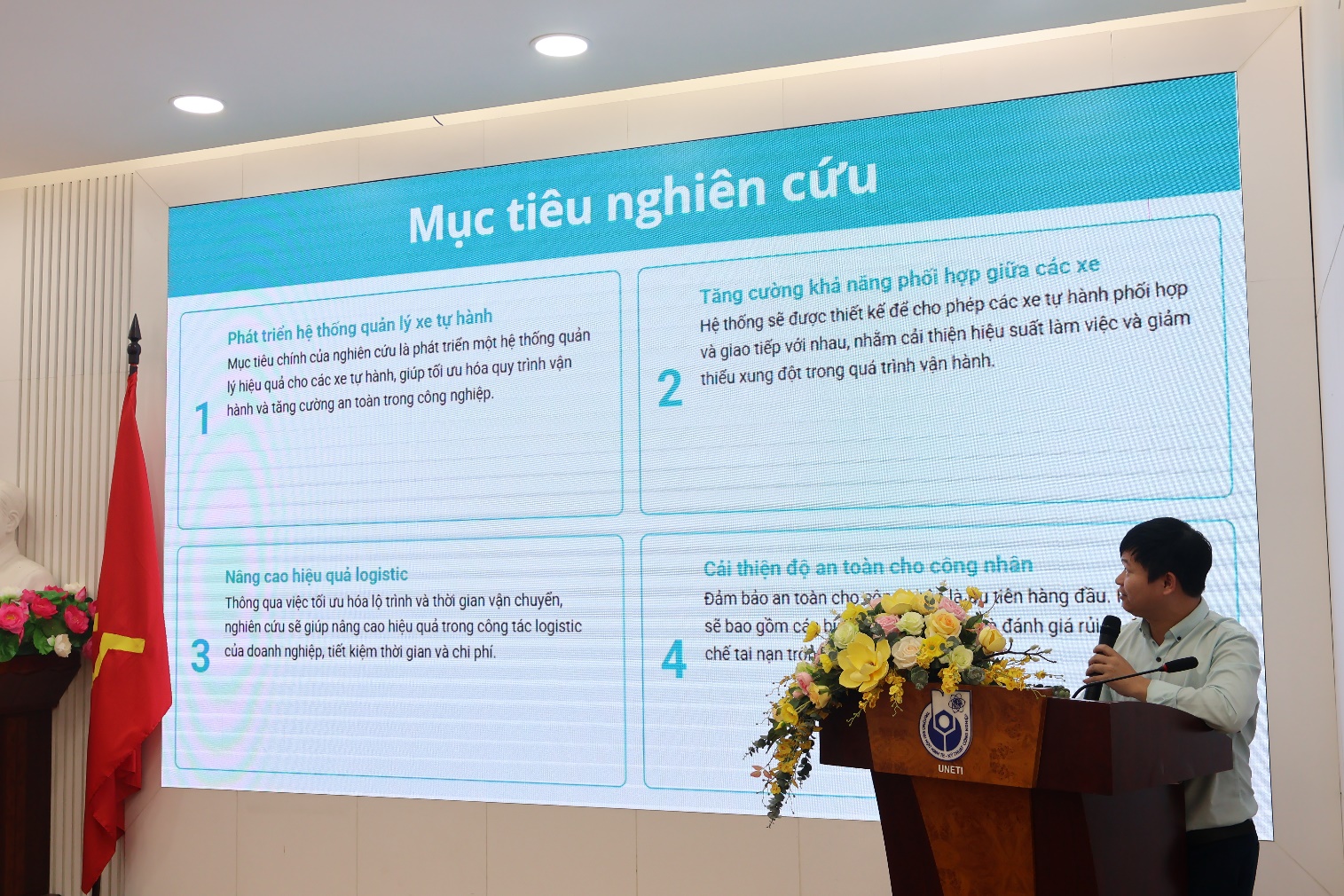
Chuyên đề 2 “Nghiên cứu xây dựng hệ thống quản lý và điều phối xe tự hành trong công nghiệp”

ThS. Hà Huy Giáp trình bày chuyên đề 3
Nội dung của Chuyên đề 4 về “Sự phát triển của xe tự hành và công nghệ lidar dẫn đường” đã thu hút sự chú ý đặc biệt từ các sinh viên. Báo cáo cung cấp thông tin tổng quan về cách thức hoạt động của lidar, ứng dụng trong xây dựng bản đồ 3D và định vị vật cản cho phương tiện tự hành.

Chuyên đề 4 về “Sự phát triển của xe tự hành và công nghệ lidar dẫn đường”
Khép lại phần trình bày, Chuyên đề 5 đã mang đến cái nhìn tổng quan về “Giải pháp nâng cao hiệu quả bài toán xác định vị trí và dẫn đường mobile robot”. Báo cáo trình bày những kỹ thuật mới nhất trong việc xác định vị trí và lập kế hoạch quỹ đạo di chuyển cho robot, một trong những bài toán then chốt trong lĩnh vực tự động hóa di động.
Sau phần trình bày tham luận, hội thảo bước vào phiên thảo luận. Các giảng viên và sinh viên đã sôi nổi đặt nhiều câu hỏi, trao đổi xoay quanh các vấn đề như tối ưu hóa thuật toán điều khiển, khả năng ứng dụng thực tế của các giải pháp trình bày, cũng như những thách thức trong quá trình triển khai các hệ thống robot tự hành trong môi trường công nghiệp Việt Nam hiện nay. Các báo cáo viên đã tận tình giải đáp, mang lại không khí học thuật cởi mở và thực sự bổ ích.

TS. Tào Ngọc Linh trình bày chuyên đề 5
Sau phần trình bày tham luận, hội thảo bước vào phiên thảo luận. Các giảng viên và sinh viên đã sôi nổi đặt nhiều câu hỏi, trao đổi xoay quanh các vấn đề như tối ưu hóa thuật toán điều khiển, khả năng ứng dụng thực tế của các giải pháp trình bày, cũng như những thách thức trong quá trình triển khai các hệ thống robot tự hành trong môi trường công nghiệp Việt Nam hiện nay. Các báo cáo viên đã tận tình giải đáp, mang lại không khí học thuật cởi mở và thực sự bổ ích.



Các bạn sinh viên tham gia đặt câu hỏi cho các báo cáo viên
Phát biểu tổng kết hội thảo, TS. Nguyễn Thành Huân đánh giá cao chất lượng các bài tham luận, sự chuẩn bị công phu của các báo cáo viên và tinh thần trao đổi sôi nổi của sinh viên. Thầy nhấn mạnh, những kiến thức và kỹ năng thu nhận được hôm nay sẽ là hành trang quý báu cho các bạn sinh viên trong hành trình nghiên cứu và khởi nghiệp trong lĩnh vực cơ điện tử, tự động hóa trong tương lai.

TS. Nguyễn Thành Huân phát biểu tổng kết hội thảo
Hội thảo đã kết thúc vào lúc 11h30 cùng ngày trong không khí vui vẻ, phấn khởi. Thành công của hội thảo có sự đóng góp quan trọng từ sự quan tâm của Ban Giám hiệu Nhà trường, sự nhiệt tình của các thầy cô giáo trong Khoa, sự nỗ lực chuẩn bị kỹ lưỡng của Ban Tổ chức và đặc biệt là tinh thần ham học hỏi, yêu thích nghiên cứu khoa học của các bạn sinh viên.

Hội thảo kết thúc thành công tốt đẹp
KHOA CƠ KHÍ
Tin tức liên quan
- Lễ bàn giao thiết bị giữa Công ty TNHH MTV Sản xuất TMVA và Trường Đại học...
- Nguyễn Vân Anh, sinh viên Khoa Quản trị và Marketing – Một gương mặt tiêu biểu...
- Sinh viên Ngô Hồng Quyên, Lớp DHKT18A1HN, Khoa Kế toán Kiểm toán, Trường Đại...
- Hoạt động nghiên cứu khoa học sinh viên năm học 2024 – 2025 của Khoa Cơ khí –...
- Nguyễn Minh Đức- sinh viên năng động, nhiệt huyết, trách nhiệm và tràn đầy...
- NGÀY HỘI HIẾN MÁU “GIỌT HỒNG UNETI 2025” LẦN 1 LAN TỎA YÊU THƯƠNG, KẾT NỐI...
- UNETI làm việc và Ký kết Bản ghi nhớ hợp tác, Thoả thuận hợp tác chương...
- Khoa Quản trị và Marketing tổ chức hội thảo “Nghiên cứu khoa học sinh viên về...
Thông báo
-
 Bộ trưởng Bộ Công Thương trao Bằng khen cho Trường Đại học...
Bộ trưởng Bộ Công Thương trao Bằng khen cho Trường Đại học...
-
 Thông báo về việc tổ chức các lớp học lại, học cải thiện...
Thông báo về việc tổ chức các lớp học lại, học cải thiện...
-
Bộ trưởng Bộ Công Thương trao Bằng khen cho Trường Đại học...
-
 Thông báo về việc mời đại diện Ban cán sự, BCH chi Đoàn và...
Thông báo về việc mời đại diện Ban cán sự, BCH chi Đoàn và...
-
Bộ trưởng Bộ Công Thương trao Bằng khen cho Trường Đại học...
-
 Kế hoạch tổ chức chương trình gặp mặt đầu năm Xuân Quý Mão...
Kế hoạch tổ chức chương trình gặp mặt đầu năm Xuân Quý Mão...
-
Bộ trưởng Bộ Công Thương trao Bằng khen cho Trường Đại học...
-
 Danh sách Sinh viên khóa 15 và khóa 16 được cấp học bổng HTHT...
Danh sách Sinh viên khóa 15 và khóa 16 được cấp học bổng HTHT...
Sự kiện
-
Bộ trưởng Bộ Công Thương trao Bằng khen cho Trường Đại học...
-
 Thông tin cơ bản về Tuyển sinh năm 2023 của Trường Đại học...
Thông tin cơ bản về Tuyển sinh năm 2023 của Trường Đại học...
-
Bộ trưởng Bộ Công Thương trao Bằng khen cho Trường Đại học...
-
 Hội thảo “Đổi mới Công nghệ, Giáo dục Khoa học và Kỹ...
Hội thảo “Đổi mới Công nghệ, Giáo dục Khoa học và Kỹ...
-
Bộ trưởng Bộ Công Thương trao Bằng khen cho Trường Đại học...
-
 Uneti tổ chức khai xuân, chúc mừng năm mới xuân Quý Mão 2023
Uneti tổ chức khai xuân, chúc mừng năm mới xuân Quý Mão 2023
-
Bộ trưởng Bộ Công Thương trao Bằng khen cho Trường Đại học...
-
 Toạ đàm “Giải pháp gắn kết đào tạo lý thuyết tại Trường...
Toạ đàm “Giải pháp gắn kết đào tạo lý thuyết tại Trường...
Tin tiêu điểm
-
Bộ trưởng Bộ Công Thương trao Bằng khen cho Trường Đại học...
-
Thông tin cơ bản về Tuyển sinh năm 2023 của Trường Đại học...
-
Bộ trưởng Bộ Công Thương trao Bằng khen cho Trường Đại học...
-
Hội thảo “Đổi mới Công nghệ, Giáo dục Khoa học và Kỹ...
-
Bộ trưởng Bộ Công Thương trao Bằng khen cho Trường Đại học...
-
Uneti tổ chức khai xuân, chúc mừng năm mới xuân Quý Mão 2023
Bài viết mới
-
Bộ trưởng Bộ Công Thương trao Bằng khen cho Trường Đại học...
-
 Lễ bàn giao thiết bị giữa Công ty TNHH MTV Sản xuất TMVA và...
Lễ bàn giao thiết bị giữa Công ty TNHH MTV Sản xuất TMVA và...
-
 Nguyễn Vân Anh, sinh viên Khoa Quản trị và Marketing – Một gương...
Nguyễn Vân Anh, sinh viên Khoa Quản trị và Marketing – Một gương...
-
Khoa Cơ khí – Trường Đại học Kinh tế – Kỹ thuật Công...
-
 Sinh viên Ngô Hồng Quyên, Lớp DHKT18A1HN, Khoa Kế toán Kiểm toán,...
Sinh viên Ngô Hồng Quyên, Lớp DHKT18A1HN, Khoa Kế toán Kiểm toán,...
-
Thông báo về việc xét, giới thiệu Đoàn viên, Sinh viên ưu tú...
Hợp tác quốc tế
-
Lễ bàn giao thiết bị giữa Công ty TNHH MTV Sản xuất TMVA và...
-
 UNETI làm việc và Ký kết Bản ghi nhớ hợp tác, Thoả thuận hợp...
UNETI làm việc và Ký kết Bản ghi nhớ hợp tác, Thoả thuận hợp...
-
 Trường Đại học Kinh tế – Kỹ thuật Công nghiệp tổ chức...
Trường Đại học Kinh tế – Kỹ thuật Công nghiệp tổ chức...
-
 Chương trình thảo luận hợp tác giữa Trường Đại học Kinh tế...
Chương trình thảo luận hợp tác giữa Trường Đại học Kinh tế...
-
 Chương trình thảo luận hợp tác giữa Trường Đại học Kinh tế...
Chương trình thảo luận hợp tác giữa Trường Đại học Kinh tế...
Nghiên cứu khoa học
-
Khoa Cơ khí – Trường Đại học Kinh tế – Kỹ thuật Công...
-
 Hoạt động nghiên cứu khoa học sinh viên năm học 2024 – 2025...
Hoạt động nghiên cứu khoa học sinh viên năm học 2024 – 2025...
-
 Khoa Quản trị và Marketing tổ chức hội thảo “Nghiên cứu khoa...
Khoa Quản trị và Marketing tổ chức hội thảo “Nghiên cứu khoa...
-
 Vòng phát triển dự án: Nơi ươm mầm sáng tạo khởi nghiệp sinh...
Vòng phát triển dự án: Nơi ươm mầm sáng tạo khởi nghiệp sinh...
-
 Đào tạo chuyên ngành công nghệ kỹ thuật cơ khí tại Trường...
Đào tạo chuyên ngành công nghệ kỹ thuật cơ khí tại Trường...
 Hội thảo “Thực trạng và giải pháp nâng cao chất lượng đào...
Hội thảo “Thực trạng và giải pháp nâng cao chất lượng đào...
 Tạp chí số 44
Tạp chí số 44
 Tạp chí số 43
Tạp chí số 43
 Tạp chí NCKH số 42
Tạp chí NCKH số 42
 Tạp chí NCKH số 41
Tạp chí NCKH số 41